
下肢偏瘫患者的康复问题长期困扰着医疗领域,亟待解决。为此,中科院沈阳自动化研究所成功研发了一种名为“刚柔耦合”的下肢多关节康复外骨骼机器人,为患者带来了新的康复希望。
康复难题凸显
目前,偏瘫康复外骨骼在临床应用中存在不少缺陷。其中,驱动方式的问题尤为明显。虽然刚性电机系统的高输出力矩在某种程度上能够发挥作用,但其笨重且冗余的特性严重影响了患者的使用便捷性;而柔性绳驱系统虽然较为轻便,但在支持功能性训练方面的能力却相对有限。然而,该构型设计未能充分满足患者的康复需求,关节运动间的协同作用不足,进而影响了临床训练的成效,使得患者的功能恢复过程变得较为缓慢。
特殊需求矛盾
偏瘫患者在康复过程中具有特定的需求。他们的患侧需要精确的指导以恢复运动能力,而健侧则需要顺畅的配合以实现整体的协调。然而,传统的统一控制方法并不能适应这种特殊状况,这种冲突导致患者在康复过程中遭遇更多困难,难以实现理想的康复目标。
关键技术突破
研究团队历经持续奋斗,成功研发出基于自主设计的串联弹性驱动器的刚柔耦合柔顺驱动关节。该关节具备与人体关节相似的自适应运动能力,并展现出多模式的刚度响应特性。在确保机器人结构具有良好柔顺性和高精度力控制能力的基础上,还能在外部冲击条件下提供稳定的运动保护,从而为患者使用增添了额外的安全保障。
驱动方案构建
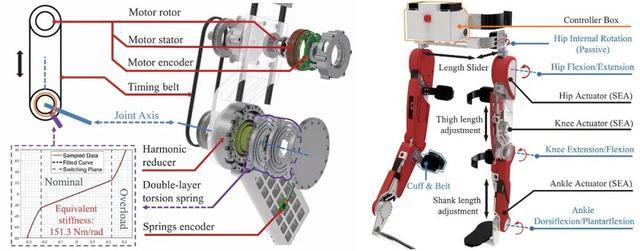
依托该关键技术的重大突破,研究团队成功研发了一套外骨骼机器人驱动策略。该策略设计轻巧,性能卓越,单个模块的重量仅为0.99千克,并具备212瓦每千克的超高功率密度。针对偏瘫患者下肢双侧同步辅助以及同侧多关节协同康复的需求,该方案实现了双侧髋关节、膝关节和踝关节的完整链路柔顺驱动,并在多个方面实现了人机的高度适配。
临床验证成效
官方公告已确认,研究团队与解放军总医院等机构携手,针对超过60名偏瘫患者进行了超过100次的临床试验。试验结果显示,该研究方法在关键康复目标上取得了显著成效。具体来看,多关节的平均跟踪精度提高了61.8%,波动范围在±17.4%之间;步态不对称指数下降了10.5%;这些成果使得患者的运动学重塑得以实现,步态变得更加自然和对称。
未来应用展望
这种“刚柔结合”型下肢多关节康复外骨骼机器人有望在未来的康复治疗领域得到广泛应用。随着技术的不断优化和成熟,该机器人有望在更多医疗机构中推广使用。它将为众多下肢瘫痪患者带来福音,助力他们恢复运动能力,提升生活品质。我们有理由相信,在相关各方的共同努力下,这种机器人将发挥出更大的效用。


 网站首页
网站首页 关于商会
关于商会 商会动态
商会动态 商会会员
商会会员 会员之家
会员之家 信息平台
信息平台 中小企业
中小企业 联系我们
联系我们